
|
Overview.The SkiiBall Robot is a Kinetic OrB Elevator (KOBE) that participates in the thrilling and gravity-defying game of Shooting Kinetic Energy Elements By Autonomously Launching Layups (SKEE-BALL). It navigates through Linear Arenas Nourishing Excitement (LANEs) to deliver a ball into a basket for points and glory. Remember, you miss 100% of the shots you don't take.
Each shot had different point values based on where they were shot. Dunking the ball was worth 1 point, while shooting the ball was worth 2-5 points, depending on the region the bot was in. Our strategy was to develop a bot that could toggle between dunking and shooting modes, to give us greater flexibility in case either mechanism failed. In dunking mode, the bot would drive forward until it hit the basket, and then use the launcher motor to push the balls into the basket. In shooting mode, the bot would drive into the 3 point region and then launch the balls into the basket. We found that shooting was generally more time efficient and accurate, so we used the shooting mode throughout the competition. |
How it works
|
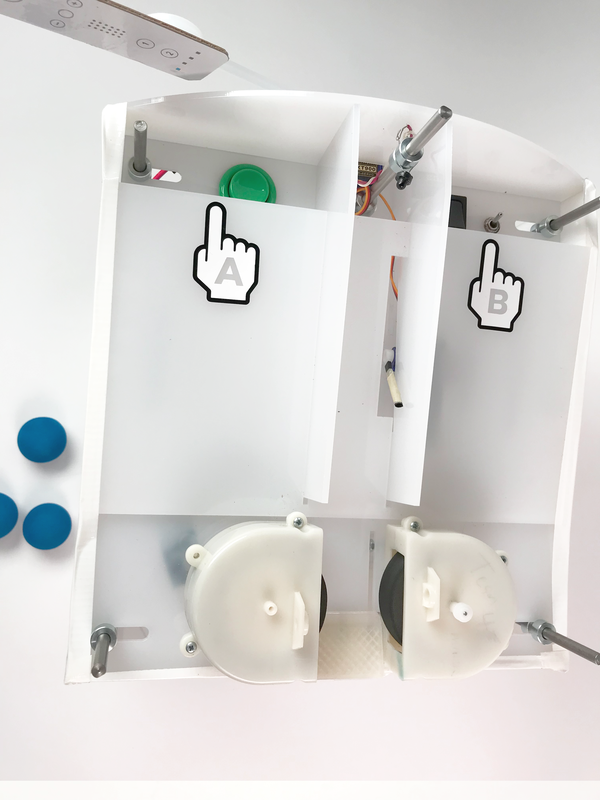
Align with the beacon
The baskets emit IR beacon at different frequencies corresponding to their title. The SkiiBall Robot detects the IR beacon frequency to determine whether it is on Team A or Team B and then lights up the corresponding LED. Aligning with the beacon helps SkiiBall Robot know the direction of the basket.
Shoot
The SkiiBot launches balls into the basket using a flywheel motor. The flywheel spins horizontally alongside a passive wheel, pushing the ball forward and launching it through the air. The motor speed can be set low for dunking, or high for shooting.
Reload
After shooting, the SkiiBall reverses into the Reload Zone, where balls are manually loaded into the robot. Once the balls are loaded and the Start button is pressed, the robot returns forward to make another shot.
Timeout in 2:18
When the Start button is pressed to kick off the game, the Wii remote begins moving. When the Wii remote reaches the end of its path in two minutes and 18 seconds, the robot comes to a complete stop.
|
|
